Maurice's Musings
On People, Life and Technology
Underworld apocalypse, à la Joan Miro
AI Art
No Responses »
Dec
07
2023
Biker bar, à la Edward Hopper
AI Art
No Responses »
Dec
07
2023
Woman with child, à la Hans Reudi Giger
AI Art
No Responses »
Dec
07
2023
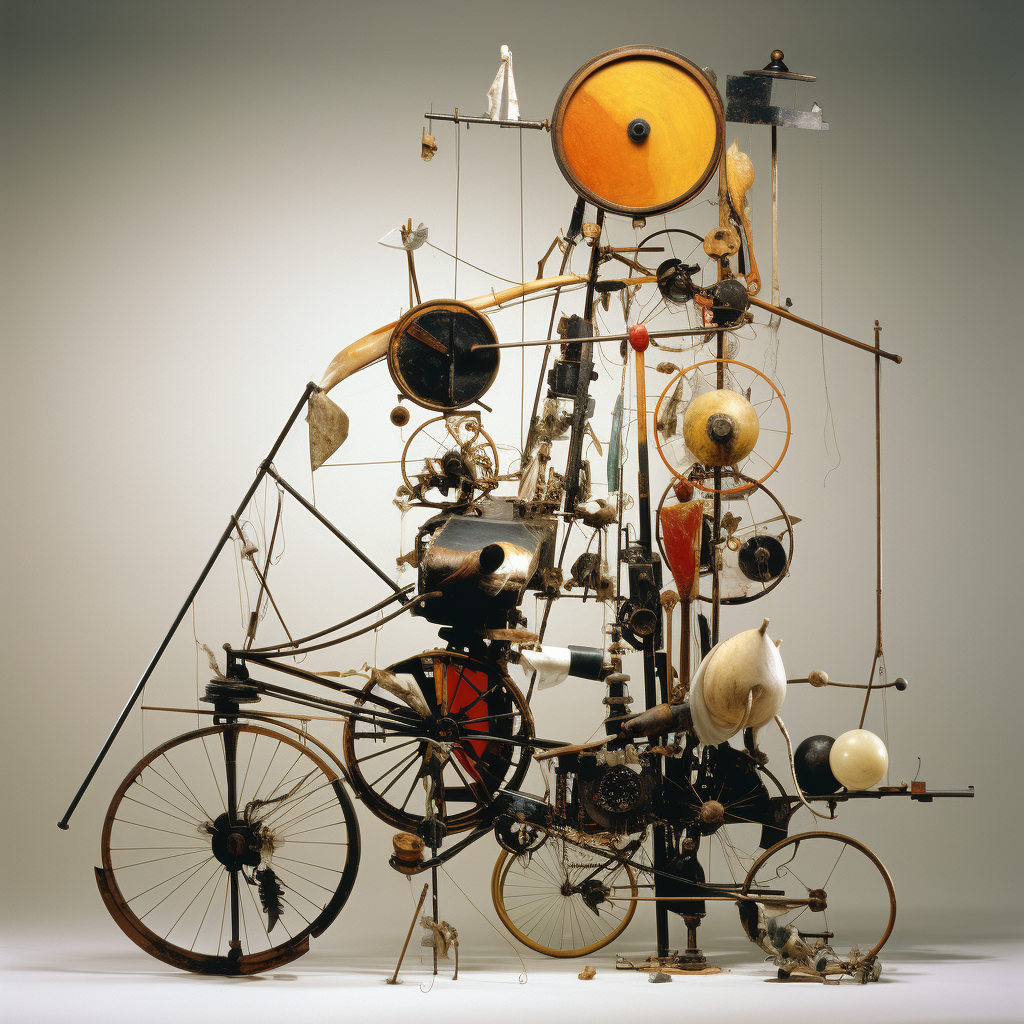
Tandem sculpture, à la Jean Tinguely
AI Art
No Responses »
Dec
07
2023
Mountain thunderstorm, à la Felix Valloton
AI Art
No Responses »
Dec
07
2023
Pouring rain on a small Dutch village, circa 1602
AI Art
No Responses »
Dec
07
2023
A tavern of wanton drunks, à la Pieter Bruegel the elder
AI Art
No Responses »
Dec
07
2023
Madness, à la Pieter Bruegel the Elder
AI Art
No Responses »
Dec
07
2023
Young boy and girl playing mandolines, à la ter Brugghen 1627
AI Art
No Responses »
Dec
07
2023
Two women at table, à la Gerard van Honthorst, 1625
AI Art
No Responses »
Dec
07
2023
Older Entries
Newer Entries